Maverick Hoziel
Fly-By-Wire Bombing Mission
This project is an interactive Python / Pygame flight simulation demonstrating how a simple Fly-By-Wire (FBW) attitude control system stabilizes an unstable aircraft during a bombing mission inside hostile airspace.
The full simulation includes:
- An unstable aircraft model
- A stabilizing FBW system
- Bomb trajectory physics
- Heat-seeking missiles
- Flares and spoofing
- HUD, artificial horizon, top-view map, rear-view camera
- FBW on/off comparison
FBW Block Diagram
FBW Block Diagram Used for Code
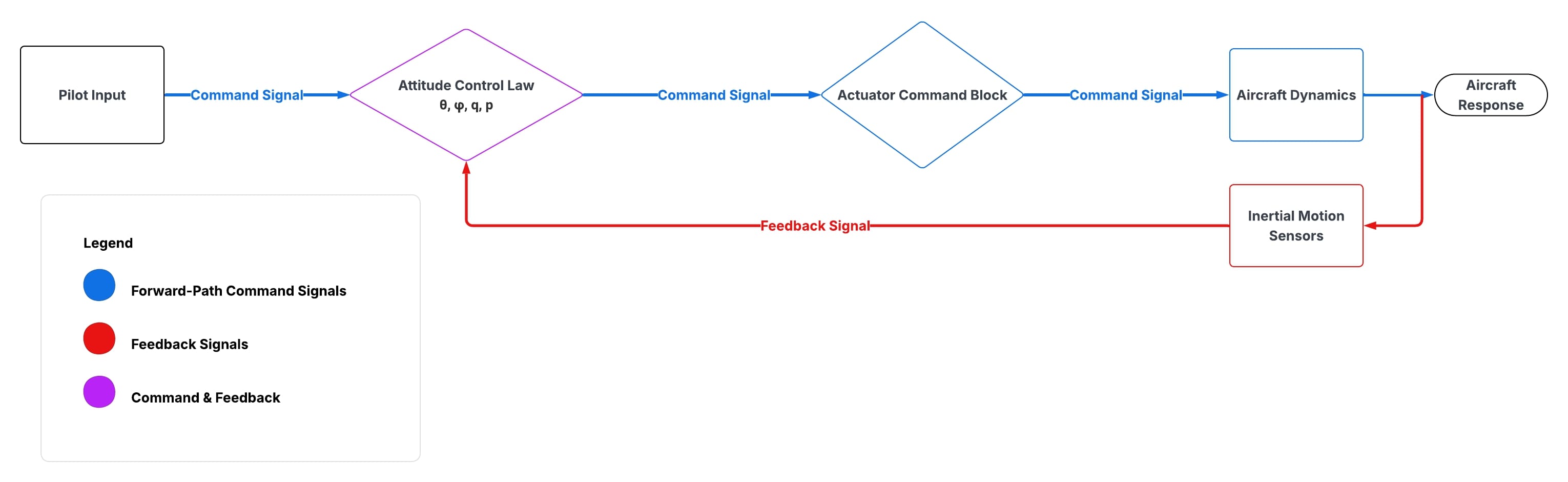
Below, each block in the diagram is mapped directly to the Python code that implements it.
1. Pilot Input
The pilot controls:
- Pitch & roll commands (Arrow keys)
- Bomb release (B)
- Flare deployment (F)
- FBW toggle (C)
- Quit (ESC)
Keyboard Event Handling
for event in pygame.event.get():
if event.type == pygame.QUIT:
self.running = False
if event.type == pygame.KEYDOWN and not self.game_over:
if event.key == pygame.K_b and self.bombs_remaining > 0:
sensors = self.aircraft.get_sensors()
new_bomb = Bomb(sensors["x"], sensors["y"], sensors["h"], sensors["psi"])
self.bombs.append(new_bomb)
self.bombs_remaining -= 1
self.bomb_away_time = self.sim_time
if event.key == pygame.K_c:
self.fbw_on = not self.fbw_on
self.fbw_mode_text = "FBW: ON (attitude hold)" if self.fbw_on else "FBW: OFF (direct surfaces)"
if event.key == pygame.K_f:
sensors = self.aircraft.get_sensors()
self.deploy_flares(sensors)
keys = pygame.key.get_pressed()
if keys[pygame.K_ESCAPE]:
self.running = False
Mapping Keys → Attitude Commands (FBW ON)
def update_commands_from_keys(self, keys, dt):
cmd_rate_deg = 20.0
if keys[pygame.K_UP]:
self.theta_cmd += math.radians(cmd_rate_deg) * dt
if keys[pygame.K_DOWN]:
self.theta_cmd -= math.radians(cmd_rate_deg) * dt
if keys[pygame.K_RIGHT]:
self.phi_cmd += math.radians(cmd_rate_deg) * dt
if keys[pygame.K_LEFT]:
self.phi_cmd -= math.radians(cmd_rate_deg) * dt
max_cmd = math.radians(30.0)
self.theta_cmd = max(-max_cmd, min(max_cmd, self.theta_cmd))
self.phi_cmd = max(-max_cmd, min(max_cmd, self.phi_cmd))
2. Attitude Control Law
A PD FBW controller that stabilizes pitch and roll.
Control Gains
KP_THETA = 2.5
KD_THETA = 1.2
KP_PHI = 2.5
KD_PHI = 1.2
MAX_DEFLECTION = 1.0
PD Control Logic
def compute_controls(self, sensors):
theta = sensors["theta"]
q = sensors["q"]
phi = sensors["phi"]
p = sensors["p"]
e_theta = self.theta_cmd - theta
delta_e = KP_THETA * e_theta - KD_THETA * q
e_phi = self.phi_cmd - phi
delta_a = KP_PHI * e_phi - KD_PHI * p
delta_e = max(-MAX_DEFLECTION, min(MAX_DEFLECTION, delta_e))
delta_a = max(-MAX_DEFLECTION, min(MAX_DEFLECTION, delta_a))
return delta_e, delta_a
3. Actuator Command Block
Chooses whether FBW or direct pilot input drives the control surfaces.
if self.fbw_on:
self.controller.update_commands_from_keys(keys, DT)
sensors = self.aircraft.get_sensors()
delta_e, delta_a = self.controller.compute_controls(sensors)
else:
delta_e = 0.0
delta_a = 0.0
step = 0.5
if keys[pygame.K_UP]:
delta_e += step
if keys[pygame.K_DOWN]:
delta_e -= step
if keys[pygame.K_RIGHT]:
delta_a += step
if keys[pygame.K_LEFT]:
delta_a -= step
delta_e = max(-MAX_DEFLECTION, min(MAX_DEFLECTION, delta_e))
delta_a = max(-MAX_DEFLECTION, min(MAX_DEFLECTION, delta_a))
FBW OFF makes the aircraft nearly unflyable because of disturbances.
4. Aircraft Dynamics
The dynamic model simulates:
- Pitch & roll motion
- Disturbances
- Heading from roll
- Altitude from pitch
- Constant forward speed
Dynamics Implementation
def step(self, delta_e, delta_a, dt):
# pitch dynamics
theta_dot = self.q
q_dot = -PITCH_DAMP * self.q + PITCH_GAIN * delta_e
q_dot += PITCH_DISTURB * random.gauss(0.0, 1.0)
# roll dynamics
phi_dot = self.p
p_dot = -ROLL_DAMP * self.p + ROLL_GAIN * delta_a
p_dot += ROLL_DISTURB * random.gauss(0.0, 1.0)
# integrate
self.theta += theta_dot * dt
self.q += q_dot * dt
self.phi += phi_dot * dt
self.p += p_dot * dt
# altitude from pitch
h_dot = FORWARD_SPEED * math.sin(self.theta)
self.h += h_dot * dt
self.h = max(self.h, 0)
# heading from roll
psi_dot = -TURN_GAIN * self.phi
self.psi += psi_dot * dt
# ground track
self.x += FORWARD_SPEED * math.sin(self.psi) * dt
self.y += FORWARD_SPEED * math.cos(self.psi) * dt
5. Inertial Motion Sensors
The IMU provides clean measurements to the controller, missiles, flares, and HUD.
def get_sensors(self):
return {
"theta": self.theta,
"q": self.q,
"phi": self.phi,
"p": self.p,
"h": self.h,
"x": self.x,
"y": self.y,
"psi": self.psi,
}
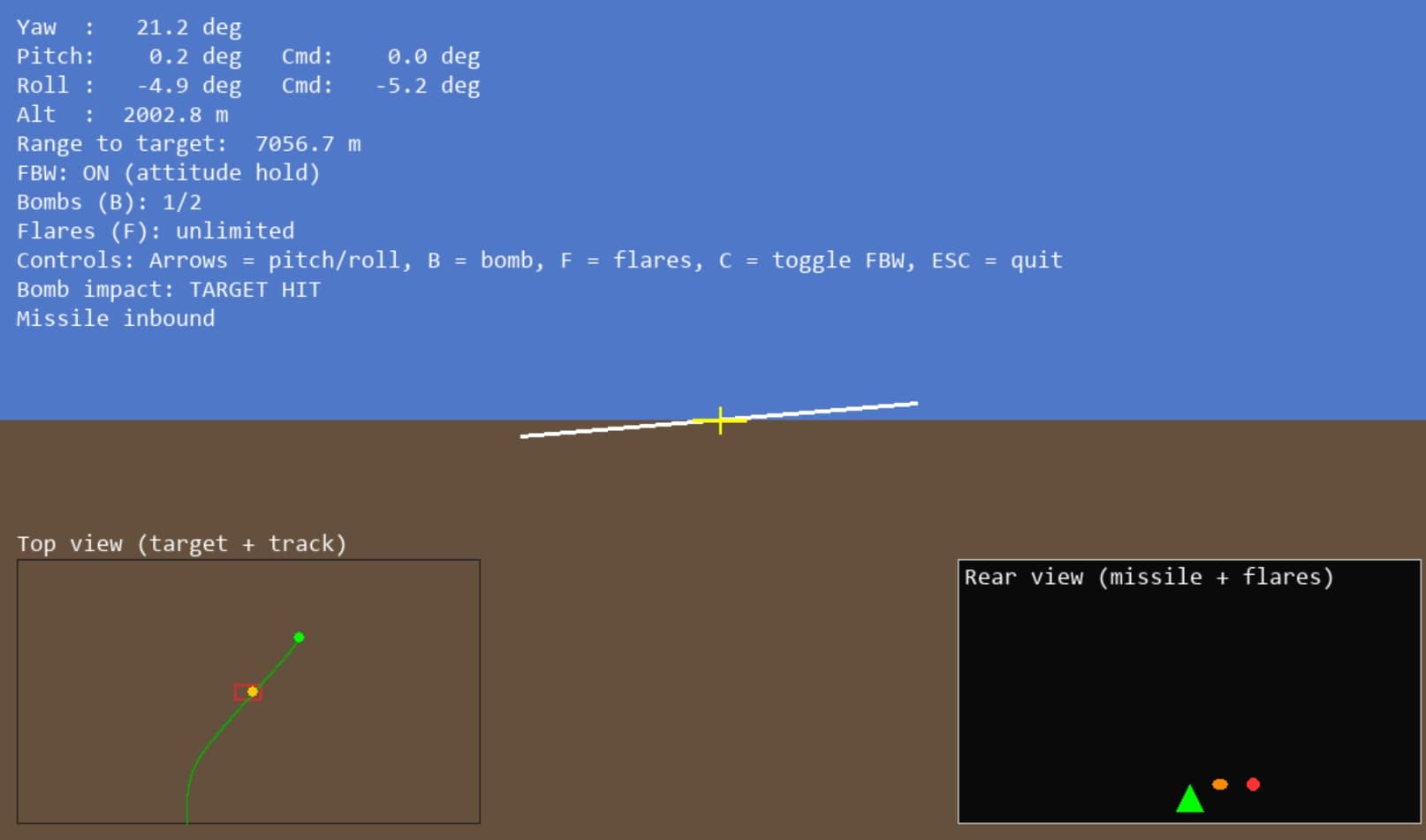
6. Aircraft Response (Displays & HUD)
This includes:
- Artificial horizon
- Rear-view missile camera
- Top-view ground map
- Bomb impact visualization
- HUD text
Example: Horizon
def draw_horizon(self, theta, phi):
...
pygame.draw.line(self.screen, (255, 255, 255), pts_screen[0], pts_screen[1], 3)
Example: Top Map
pygame.draw.rect(self.screen, (200, 50, 50), (tl[0], tl[1], rect_w, rect_h), 2)
pygame.draw.circle(self.screen, (0, 255, 0), (ax, ay), 4)
Example: HUD
lines = [
f"Pitch: {theta_deg:.1f} deg Cmd: {math.degrees(self.controller.theta_cmd):.1f} deg",
f"Roll : {phi_deg:.1f} deg Cmd: {math.degrees(self.controller.phi_cmd):.1f} deg",
f"Alt : {h:.1f} m",
...
]
Gameplay Overview
Gameplay
1. Ingress
Fly stably with FBW ON while disturbances try to destabilize you.
2. Bombing Run
Press B over the target square.
3. Missile Threat
Heat-seeking missiles spawn behind you.
4. Flares
Press F to deploy flares that spoof missiles.
5. FBW Comparison
Toggle C to see how unstable the aircraft becomes without FBW.
Running the Simulation
Requirements:
- Python 3
- pygame
- numpy
Summary
This simulation demonstrates:
- How an FBW attitude controller stabilizes an unstable aircraft
- How feedback loops map to real physics
- How bombs, missiles, and flares can be integrated into an aerospace simulation
- How control engineering, avionics, and gameplay logic come together in one project